
Lundi 17 juin dernier, Moad Kissai, doctorant à l'ENSTA ParisTech, a soutenu sa thèse intitulée "Coordination Optimale des Systèmes Châssis pour le Contrôle du Mouvement des Voitures".
Résumé de la thèse :
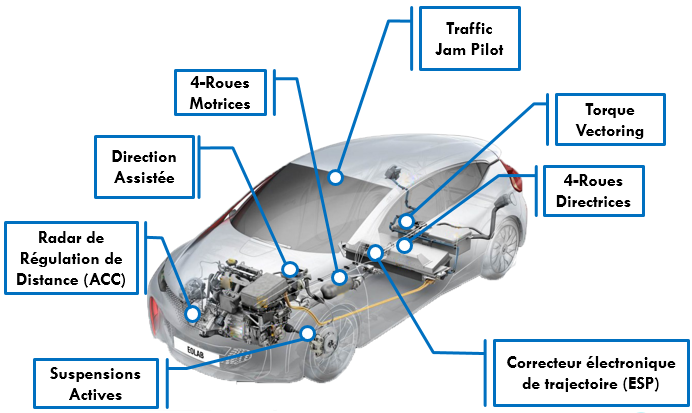
Le contrôle global du châssis a fait récemment l'objet d'une attention particulière. Cela serait motivé surtout par l’approche des véhicules entièrement autonomes. Ces véhicules, en particulier le niveau 5 d’automatisation SAE (J3016), devraient remplacer le conducteur humain dans presque toutes les situations. Le véhicule automatisé devrait être capable de gérer en harmonie des situations couplées où sont intégrés le contrôle longitudinal, latéral et éventuellement vertical. Pour ce faire, le véhicule dispose de plusieurs systèmes intégrés par axe de contrôle. En effet, les équipementiers automobiles et les nouveaux acteurs de l'industrie automobile proposent continuellement de nouvelles solutions pour satisfaire des performances bien spécifiques. Le constructeur automobile doit quant à lui coordonner différents sous-systèmes provenant de différentes parties prenantes afin de garantir une expérience de conduite fiable et confortable. Jusqu'à présent, les constructeurs automobiles privilégiaient des solutions simples consistant à ajouter une couche de coordination en aval des soussystèmes concurrents afin de limiter les potentiels conflits. La plupart des stratégies adoptées consistent à prioriser un système par rapport à un autre en fonction de certains scénarios conflictuels prévisibles. Les véhicules autonomes ont besoin de sous-systèmes supplémentaires pour fonctionner en toute sécurité. Ainsi, les interactions entre les sous-systèmes s'amplifieront au point de devenir imprévisibles. Cette thèse met l'accent sur l'approche de coordination qui devrait être adoptée par les véhicules du futur. En particulier, la couche de coordination est déplacée en amont des sous-systèmes autonomes pour assurer une distribution de commande optimale. Cette couche agit comme un superviseur basé sur des algorithmes d'allocation optimale du contrôle. La synthèse des correcteurs repose sur les théories du contrôle robuste permettant de faire face aux changements environnementaux et aux incertitudes paramétriques et dynamiques du véhicule. Les résultats ont d’abord montré que même en ce qui concerne les véhicules actuels, l’approche en amont peut offrir des avantages supplémentaires pour ce qui est de la résolution de problèmes à objectifs multiples. En outre, l’approche en amont permet de coordonner les sous-systèmes des véhicules présentant une sur-actionnement plus élevé. La tolérance aux pannes peut être assurée entre des systèmes de châssis complètement différents, et des objectifs qualitatifs, s'ils sont rigoureusement formalisés, peuvent être satisfaits. Plus les sous-systèmes seront nombreux à l'avenir, plus l'approche en amont deviendrait pertinente pour le contrôle du mouvement des véhicules. Nous espérons que les avantages conséquents présentés dans cette thèse grâce à une approche de coordination en amont optimale encourageraient les constructeurs automobiles et leurs équipementiers à opter pour des solutions plus ouvertes, à proposer ensemble les normalisations nécessaires et accélérer ainsi le développement des véhicules autonomes.
Composition du Jury :
- M. Valentin IVANOV, Technische Universität Ilmenau, Rapporteur
- M. Olivier SENAME, Institut polytechnique de Grenoble, Rapporteur
- M. Barys SHYROKAU, Delft University of Technology, Examinateur
- M. Craig BEA,L Bucknell University, Examinateur
- M. Bruno MONSUEZ École Nationale Supérieure de Techniques Avancées (ENSTA Paris), Directeur de thèse
- Mme Adriana TAPUS École Nationale Supérieure de Techniques Avancées (ENSTA Paris) Co-directeur de thèse
- M. Didier MARTINEZ, Renault - Centre Technique d'Aubevoye, Invité
- M. Xavier MOUTON, Renault - Technocentre, Invité